
Insights
Hier erfahrt ihr die neuesten Insights & Trends aus der UX-Welt und über UID.
UID Live Masterclasses:
Mehr erfahren!
Bring deine UX-Skills auf das nächste Level: Unsere UID-Expert:innen vermitteln in Live Masterclasses geballtes Insiderwissen – praxisnah, persönlich und sofort anwendbar.
UX-News: Was uns bewegt

14. Juli 2026
Vom Bedienfeld zum WOW-Moment: HMI Design im Maschinenbau

18. Juni 2026
Crowdtesting im User Research: Wenn UX auf die Realität trifft

16. Juni 2026
KI im User Research: Effizienz mit Human-in-the-Loop

18. Mai 2026
Wenn gute Apps noch einen Schritt weitergehen

28. April 2026
Warum Digitalisierung scheitert und wie Menschen sie wirksam machen

14. April 2026
UX-Check mit UID: nutrilize-Gründer Alexander Weber im Interview

5. März 2026
Kostenfalle Bad UX
2. März 2026
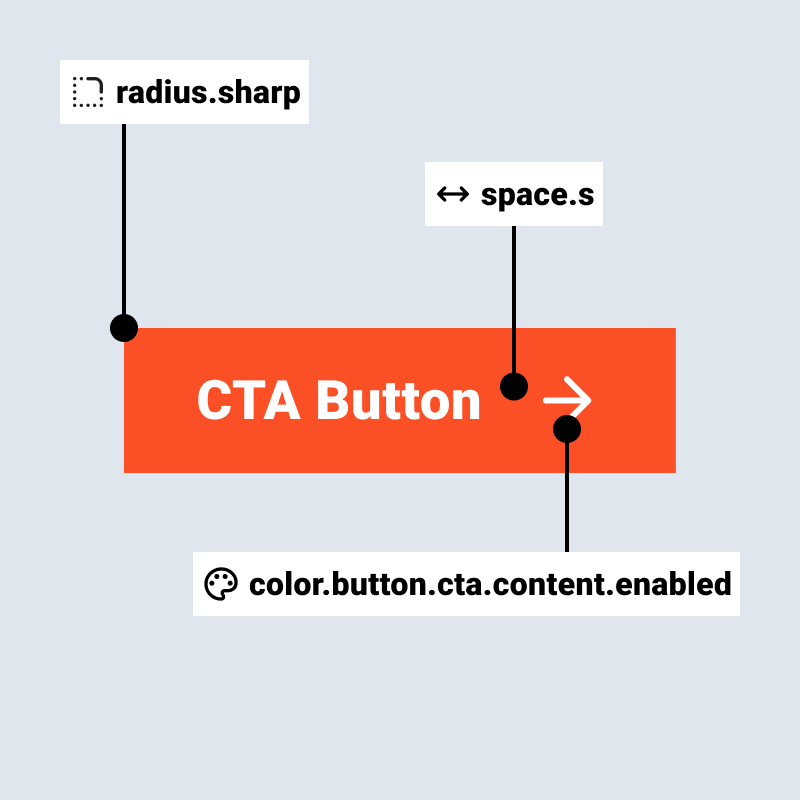
Design Tokens: kleine Bausteine, große KI-Wirkung

22. Januar 2026
Interview: Warum Designpreise ein strategisches Business-Instrument sind